Разделы сайта
Выбор редакции:
- Контрольная работа по обществознанию на тему:«Человек в социальном измерении
- Тест особенности взаимодействия природы и человека
- Борьба с неблагоприятными условиями внешней среды (приспособление)
- Белки как форма существования жизни Клиническое значение ферментов
- 2 Фотосинтез, необходимые для него условия
- Биология в лицее Чем личинка рыбы отличается от малька
- Определение биологии как науки
- Бланки форм документов по учету основных средств
- Банковская карточка с образцами подписей и оттиска печати
- Как сделать домашние чипсы
Реклама
| Названия датчиков. Датчики - их назначение, принцип действия |
|
Электротехническая энциклопедия #16. Датчики Классификация датчиков, основные требования к ним Автоматизация различных технологических процессов, эффективное управление различными агрегатами, машинами, механизмами требуют многочисленных измерений разнообразных физических величин. Датчики (в литературе часто называемые также измерительными преобразователями), или по-другому, сенсоры являются элементами многих систем автоматики - с их помощью получают информацию о параметрах контролируемой системы или устройства. Датчик – это элемент измерительного, сигнального, регулирующего или управляющего устройства, преобразующий контролируемую величину (температуру, давление, частоту, силу света, электрическое напряжение, ток и т.д.) в сигнал, удобный для измерения, передачи, хранения, обработки, регистрации, а иногда и для воздействия им на управляемые процессы. Или проще, датчик – это устройство, преобразующее входное воздействие любой физической величины в сигнал, удобный для дальнейшего использования. Используемые датчики весьма разнообразны и могут быть классифицированы по различным признакам:В зависимости от вида входной (измеряемой) величины различают: датчики механических перемещений (линейных и угловых), пневматические, электрические, расходомеры, датчики скорости, ускорения, усилия, температуры, давления и др. В настоящее время существует приблизительно следующее распределение доли измерений различных физических величин в промышленности: температура – 50%, расход (массовый и объемный) – 15%, давление – 10%, уровень – 5%, количество (масса, объем) – 5%, время – 4%, электрические и магнитные величины – менее 4%. По виду выходной величины, в которую преобразуется входная величина , различают неэлектрические и электрические : датчики постоянного тока (ЭДС или напряжения), датчики амплитуды переменного тока (ЭДС или напряжения), датчики частоты переменного тока (ЭДС или напряжения), датчики сопротивления (активного, индуктивного или емкостного) и др. Большинство датчиков являются электрическими. Это обусловлено следующими достоинствами электрических измерений: Электрические величины удобно передавать на расстояние, причем передача осуществляется с высокой скоростью; Электрические величины универсальны в том смысле, что любые другие величины могут быть преобразованы в электрические и наоборот; Они точно преобразуются в цифровой код и позволяют достигнуть высокой точности, чувствительности и быстродействия средств измерений. По принципу действия датчики можно разделить на два класса: генераторные и параметрические (датчики-модуляторы). Генераторные датчики осуществляют непосредственное преобразование входной величины в электрический сигнал. Параметрические датчики входную величину преобразуют в изменение какого-либо электрического параметра (R , L или C ) датчика. По принципу действия датчики также можно разделить на омические, реостатные, фотоэлектрические (оптико-электронные), индуктивные, емкостные и д.р. Различают три класса датчиков: Аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины; Цифровые датчики, генерирующие последовательность импульсов или двоичное слово; Бинарные (двоичные) датчики, которые вырабатывают сигнал только двух уровней: "включено/выключено" (иначе говоря, 0 или 1); получили широкое распространение благодаря своей простоте. Требования, предъявляемые к датчикам : Однозначная зависимость выходной величины от входной; Стабильность характеристик во времени; Высокая чувствительность; Малые размеры и масса; Отсутствие обратного воздействия на контролируемый процесс и на контролируемый параметр; Работа при различных условиях эксплуатации; - различные варианты монтажа . Параметрические датчики (датчики-модуляторы) входную величину X преобразуют в изменение какого-либо электрического параметра (R , L или C ) датчика. Передать на расстояние изменение перечисленных параметров датчика без энергонесущего сигнала (напряжения или тока) невозможно. Выявить изменение соответствующего параметра датчика только и можно по реакции датчика на ток или напряжение, поскольку перечисленные параметры и характеризуют эту реакцию. Поэтому параметрические датчики требуют применения специальных измерительных цепей с питанием постоянным или переменным током. Омические (резистивные) датчики – принцип действия основан на изменении их активного сопротивления при изменении длины l , площади сечения S или удельного сопротивления p : R = p l / S Кроме того, используется зависимость величины активного сопротивления от контактного давления и освещённости фотоэлементов. В соответствии с этим омические датчики делят на: контактные, потенциометрические (реостатные), тензорезисторные, терморезисторные, фоторезисторные . Контактные датчики - это простейший вид резисторных датчиков, которые преобразуют перемещение первичного элемента в скачкообразное изменение сопротивления электрической цепи. С помощью контактных датчиков измеряют и контролируют усилия, перемещения, температуру, размеры объектов, контролируют их форму и т. д. К контактным датчикам относятся путевые и концевые выключатели , контактные термометры и так называемые электродные датчики , используемые в основном для измерения предельных уровней электропроводных жидкостей. Контактные датчики могут работать как на постоянном, так и на переменном токе. В зависимости от пределов измерения контактные датчики могут быть одно предельными и многопредельными. Последние используют для измерения величин, изменяющихся в значительных пределах, при этом части резистора R , включенного в электрическую цепь, последовательно закорачиваются. Недостаток контактных датчиков - сложность осуществления непрерывного контроля и ограниченный срок службы контактной системы. Но благодаря предельной простоте этих датчиков их широко применяют в системах автоматики. Реостатные датчики представляют собой резистор с изменяющимся активным сопротивлением. Входной величиной датчика является перемещение контакта, а выходной – изменение его сопротивления. Подвижный контакт механически связан с объектом, перемещение (угловое или линейное) которого необходимо преобразовать. Наибольшее распространение получила потенциометрическая схема включения реостатного датчика, в которой реостат включают по схеме делителя напряжения. Напомним, что делителем напряжения называют электротехническое устройство для деления постоянного или переменного напряжения на части; делитель напряжения позволяет снимать (использовать) только часть имеющегося напряжения посредством элементов электрической цепи, состоящей из резисторов, конденсаторов или катушек индуктивности. Переменный резистор, включаемый по схеме делителя напряжения, называют потенциометром. Обычно реостатные датчики применяют в механических измерительных приборах для преобразования их показаний в электрические величины (ток или напряжение), например, в поплавковых измерителях уровня жидкостей, различных манометрах и т. п. Датчик в виде простого реостата почти не используется вследствие значительной нелинейности его статической характеристики I н = f (х), где I н - ток в нагрузке. Выходной величиной такого датчика является падение напряжения U вых между подвижным и одним из неподвижных контактов. Зависимость выходного напряжения от перемещения х контакта U вых = f (х) соответствует закону изменения сопротивления вдоль потенциометра. Закон распределения сопротивления по длине потенциометра, определяемый его конструкцией, может быть линейным или нелинейным. Потенциометрические датчики, конструктивно представляющие собой переменные резисторы, выполняют из различных материлов - обмоточного провода, металлических пленок, полупроводников и т. д. Тензорезисторы (тензометрические датчики ) служат для измерения механических напряжений, небольших деформаций, вибрации. Действие тензорезисторов основано на тензоэффекте, заключающемся в изменении активного сопротивления проводниковых и полупроводниковых материалов под воздействием приложенных к ним усилий. Термометрические датчики (терморезисторы ) - сопротивление зависит от температуры. Терморезисторы в качестве датчиков используют двумя способами: 1) Температура терморезистора определяется окружающей средой; ток, проходящий через терморезистор, настолько мал, что не вызывает нагрева терморезистора. При этом условии терморезистор используется как датчик температуры и часто называется «термометром сопротивления». 2) Температура терморезистора определяется степенью нагрева постоянным по величине током и условиями охлаждения. В этом случае установившаяся температура определяется условиями теплоотдачи поверхности терморезистора (скоростью движения окружающей среды – газа или жидкости – относительно терморезистора, ее плотностью, вязкостью и температурой), поэтому терморезистор может быть использован как датчик скорости потока, теплопроводности окружающей среды, плотности газов и т. п. В датчиках такого рода происходит как бы двухступенчатое преобразование: измеряемая величина сначала преобразуется в изменение температуры терморезистора, которое затем преобразуется в изменение сопротивления. Терморезисторы изготовляют как из чистых металлов, так и из полупроводников. Материал, из которого изготавливается такие датчики, должен обладать высоким температурным коэффициентом сопротивления, по возможности линейной зависимостью сопротивления от температуры, хорошей воспроизводимостью свойств и инертностью к воздействиям окружающей среды. В наибольшей степени всем указанным свойствам удовлетворяет платина; в чуть меньшей – медь и никель. По сравнению с металлическими терморезисторами более высокой чувствительностью обладают полупроводниковые терморезисторы (термисторы). Индуктивные датчики служат для бесконтактного получения информации о перемещениях рабочих органов машин, механизмов, роботов и т.п. и преобразования этой информации в электрический сигнал. Принцип действия индуктивного датчика основан на изменении индуктивности обмотки на магнитопроводе в зависимости от положения отдельных элементов магнитопровода (якоря, сердечника и др.). В таких датчиках линейное или угловое перемещение X (входная величина) преобразуется в изменение индуктивности (L ) датчика. Применяются для измерения угловых и линейных перемещений, деформаций, контроля размеров и т.д. В простейшем случае индуктивный датчик представляет собой катушку индуктивности с магнитопроводом, подвижный элемент которого (якорь) перемещается под действием измеряемой величины. Индуктивный датчик распознает и соответственно реагирует на все токопроводящие предметы. Индуктивный датчик является бесконтактным, не требует механичесого воздействия, работает бесконтактно за счет изменения электромагнитного поля. Преимущества - нет механического износа, отсутствуют отказы, связанные с состоянием контактов - отсутствует дребезг контактов и ложные срабатывания - высокая частота переключений до 3000 Hz - устойчив к механическим воздействиям Недостатки - сравнительно малая чувствительность, зависимость индуктивного сопротивления от частоты питающего напряжения, значительное обратное воздействие датчика на измеряемую величину (за счет притяжения якоря к сердечнику). Емкостные датчики - принцип действия основан на зависимости электрической емкости конденсатора от размеров, взаимного расположения его обкладок и от диэлектрической проницаемости среды между ними. Для двухобкладочного плоского конденсатора электрическая емкость определяется выражением: С = e 0 e S / h где e 0 - диэлектрическая постоянная; e - относительная диэлектрическая проницаемость среды между обкладками; S - активная площадь обкладок; h - расстояние между обкладками конденсатора. Зависимости C (S ) и C (h ) используют для преобразования механических перемещений в изменение емкости. Емкостные датчики, также как и индуктивные, питаются переменным напряжением (обычно повышенной частоты - до десятков мегагерц). В качестве измерительных схем обычно применяют мостовые схемы и схемы с использованием резонансных контуров. В последнем случае, как правило, используют зависимость частоты колебаний генератора от емкости резонансного контура, т.е. датчик имеет частотный выход. Достоинства емкостных датчиков - простота, высокая чувствительность и малая инерционность. Недостатки - влияние внешних электрических полей, относительная сложность измерительных устройств. Емкостные датчики применяют для измерения угловых перемещений, очень малых линейных перемещений, вибраций, скорости движения и т. д., а также для воспроизведения заданных функций (гармонических, пилообразных, прямоугольных и т. п.). Емкостные преобразователи, диэлектрическая проницаемость e которых изменяется за счет перемещения, деформации или изменения состава диэлектрика, применяют в качестве датчиков уровня непроводящих жидкостей, сыпучих и порошкообразных материалов, толщины слоя непроводящих материалов (толщиномеры), а также контроля влажности и состава вещества. Датчики – генераторы Генераторные датчики осуществляют непосредственное преобразование входной величины X в электрический сигнал. Такие датчики преобразуют энергию источника входной (измеряемой) величины сразу в электрический сигнал, т.е. они являются как бы генераторами электроэнергии (откуда и название таких датчиков - они генерируют электрический сигнал). Дополнительные источники электроэнергии для работы таких датчиков принципиально не требуются (тем не менее дополнительная электроэнергия может потребоваться для усиления выходного сигнала датчика, его преобразования в другие виды сигналов и других целей). Генераторными являются термоэлектрические, пьезоэлектрические, индукционные, фотоэлектрические и многие другие типы датчиков. Индукционные датчики преобразуют измеряемую неэлектрическую величину в ЭДС индукции. Принцип действия датчиков основан на законе электромагнитной индукции. К этим датчикам относятся тахогенераторы постоянного и переменного тока, представляющие собой небольшие электромашинные генераторы, у которых выходное напряжение пропорционально угловой скорости вращения вала генератора. Тахогенераторы используются как датчики угловой скорости. Тахогенератор представляет собой электрическую машину, работающую в генераторном режиме. При этом вырабатываемая ЭДС пропорциональна скорости вращения и величине магнитного потока. Кроме того, с изменением скорости вращения изменяется частота ЭДС. Применяются как датчики скорости (частоты вращения). Температурные датчики. В современном промышленном производстве наиболее распространенными являются измерения температуры (так, на атомной электростанции среднего размера имеется около 1500 точек, в которых производится такое измерение, а на крупном предприятии химической промышленности подобных точек присутствует свыше 20 тыс.). Широкий диапазон измеряемых температур, разнообразие условий использования средств измерений и требований к ним определяют многообразие применяемых средств измерения температуры. Если рассматривать датчики температуры для промышленного применения, то можно выделить их основные классы: кремниевые датчики температуры, биметаллические датчики, жидкостные и газовые термометры, термоиндикаторы, термисторы, термопары, термопреобразователи сопротивления, инфракрасные датчики. Кремниевые датчики температуры используют зависимость сопротивления полупроводникового кремния от температуры. Диапазон измеряемых температур -50…+150 0 C . Применяются в основном для измерения температуры внутри электронных приборов. Биметаллический датчик сделан из двух разнородных металлических пластин, скрепленных между собой. Разные металлы имеют различный температурный коэффициент расширения. Если соединенные в пластину металлы нагреть или охладить, то она изогнется, при этом замкнет (разомкнет) электрические контакты или переведет стрелку индикатора. Диапазон работы биметаллических датчиков -40…+550 0 C . Используются для измерения поверхности твердых тел и температуры жидкостей. Основные области применения – автомобильная промышленность, системы отопления и нагрева воды. Термоиндикаторы – это особые вещества, изменяющие свой цвет под воздействием температуры. Изменение цвета может быть обратимым и необратимым. Производятся в виде пленок. Термопреобразователи сопротивления Принцип действия термопреобразователей сопротивления (терморезисторов) основан на изменении электрического сопротивления проводников и полупроводников в зависимости от температуры (рассмотрен ранее). Платиновые терморезисторы предназначены для измерения температур в пределах от –260 до 1100 0 С. Широкое распространение на практике получили более дешевые медные терморезисторы, имеющие линейную зависимость сопротивления от температуры. Недостатком меди является небольшое ее удельное сопротивление и легкая окисляемость при высоких температурах, вследствие чего конечный предел применения медных термометров сопротивления ограничивается температурой 180 0 C . По стабильности и воспроизводимости характеристик медные терморезисторы уступают платиновым. Никель используется в недорогих датчиках для измерения в диапазоне комнатных температур. Полупроводниковые терморезисторы (термисторы) имеют отрицательный или положительный температурный коэффициент сопротивления, значение которого при 20 0 C составляет (2…8)*10 –2 (0 C ) –1 , т.е. на порядок больше, чем у меди и платины. Полупроводниковые терморезисторы при весьма малых размерах имеют высокие значения сопротивления (до 1 МОм). В качестве полупров. материала используются оксиды металлов: полупроводниковые терморезисторы типов КМТ - смесь окислов кобальта и марганца и ММТ - меди и марганца. Полупроводниковые датчики температуры обладают высокой стабильностью характеристик во времени и применяются для изменения температур в диапазоне от –100 до 200 0 С. Термоэлектрические преобразователи (термопары) - п ринцип действия термопар основан на термоэлектрическом эффекте, который состоит в том, что при наличии разности температур мест соединений (спаев) двух разнородных металлов или полупроводников в контуре возникает электродвижущая сила, называемая термоэлектродвижущей (сокращенно термо-ЭДС). В определенном интервале температур можно считать, что термо-ЭДС прямо пропорциональна разности температур ΔT = Т 1 – Т 0 между спаем и концами термопары. Соединенные между собой концы термопары, погружаемые в среду, температура которой измеряется, называют рабочим концом термопары. Концы, которые находятся в окружающей среде, и которые обычно присоединяют проводами к измерительной схеме, называют свободными концами. Температуру этих концов необходимо поддерживать постоянной. При этом условии термо-ЭДС Е т будет зависеть только от температуры T 1 рабочего конца. U вых = E т = С(Т 1 – Т 0) , где С – коэффициент, зависящий от материала проводников термопары. Создаваемая термопарами ЭДС сравнительно невелика: она не превышает 8 мВ на каждые 100 0 С и обычно не превышает по абсолютной величине 70 мВ. Термопары позволяют измерять температуру в диапазоне от –200 до 2200 0 С. Наибольшее распространение для изготовления термоэлектрических преобразователей получили платина, платинородий, хромель, алюмель. Термопары имеют следующие преимущества : простота изготовления и надёжность в эксплуатации, дешевизна, отсутствие источников питания и возможность измерений в большом диапазоне температур. Наряду с этим термопарам свойственны и некоторые недостатки - меньшая, чем у терморезисторов, точность измерения, наличие значительной тепловой инерционности, необходимость введения поправки на температуру свободных концов и необходимость в применении специальных соединительных проводов. Инфрокрасные датчики (пирометры) - используют энергию излучения нагретых тел, что позволяет измерять температуру поверхности на расстоянии. Пирометры делятся на радиационные, яркостные и цветовые. Радиационные пирометры используются для измерения температуры от 20 до 2500 0 С, причем прибор измеряет интегральную интенсивность излучения реального объекта. Яркостные (оптические) пирометры используются для измерения температур от 500 до 4000 0 С. Они основаны на сравнении в узком участке спектра яркости исследуемого объекта с яркостью образцового излучателя (фотометрической лампы). Цветовые пирометры основаны на измерении отношения интенсивностей излучения на двух длинах волн, выбираемых обычно в красной или синей части спектра; они используются для измерения температуры в диапазоне от 800 0 С. Пирометры позволяют измерять температуру в труднодоступных местах и температуру движущихся объектов, высокие температуры, где другие датчики уже не работают. Для измерения температур от – 80 до 250 0 С часто используются так называемые кварцевые термопреобразователи, использующие зависимость собственной частоты кварцевого элемента от температуры. Работа данных датчиков основана на том, что зависимость частоты преобразователя от температуры и линейность функции преобразования изменяются в зависимости от ориентации среза относительно осей кристалла кварца. Данные датчики широко используются в цифровых термометрах. Пьезоэлектрические датчики Действие пьезоэлектрических датчиков основано на использовании пьезоэлектрического эффекта (пьезоэффекта), заключающегося в том, что при сжатии или растяжении некоторых кристаллов на их гранях появляется электрический заряд, величина которого пропорциональна действующей силе. Пьезоэффект обратим, т. е. приложенное электрическое напряжение вызывает деформацию пьезоэлектрического образца - сжатие или растяжение его соответственно знаку приложенного напряжения. Это явление, называемое обратным пьезоэффектом, используется для возбуждения и приема акустических колебаний звуковой и ультразвуковой частоты. Используются для измерения сил, давления, вибрации и т.д. Оптические (фотоэлектрические) датчики Различают аналоговые и дискретные оптические датчики. У аналоговых датчиков выходной сигнал изменяется пропорционально внешней освещенности. Основная область применения – автоматизированные системы управления освещением. Датчики дискретного типа изменяют выходное состояние на противоположное при достижении заданного значения освещенности. Фотоэлектрические датчики могут быть применены практически во всех отраслях промышленности. Датчики дискретного действия используются как своеобразные бесконтактные выключатели для подсчета, обнаружения, позиционирования и других задач на любой технологической линии. , регистрирует изменение светового потока в контролируемой области, связанное с изменением положения в пространстве каких-либо движущихся частей механизмов и машин, отсутствия или присутствия объектов. Благодаря большим расстояниям срабатывания оптические бесконтактные датчики нашли широкое применение в промышленности и не только. Оптический бесконтактный датчик состоит из двух функциональных узлов, приемника и излучателя. Данные узлы могут быть выполнены как в одном корпусе, так и в различных корпусах. По методу обнаружения объекта фотоэлектрические датчики подразделяются на 4 группы: 1) пересечение луча - в этом методе передатчик и приемник разделены по разным корпусам, что позволяет устанавливать их напротив друг друга на рабочем расстоянии. Принцип работы основан на том, что передатчик постоянно посылает световой луч, который принимает приемник. Если световой сигнал датчика прекращается, в следствии перекрытия сторонним объектом, приемник немедленно реагирует меняя состояние выхода. 2) отражение от рефлектора - в этом методе приемник и передатчик датчика находятся в одном корпусе. Напротив датчика устанавливается рефлектор (отражатель). Датчики с рефлектором устроены так, что благодаря поляризационному фильтру они воспринимают отражение только от рефлектора. Это рефлекторы, которые работают по принципу двойного отражения. Выбор подходящего рефлектора определяется требуемым расстоянием и монтажными возможностями. Посылаемый передатчиком световой сигнал отражаясь от рефлектора попадает в приемник датчика. Если световой сигнал прекращается, приемник немедленно реагирует, меняя состояние выхода.3) отражение от объекта - в этом методе приемник и передатчик датчика находятся в одном корпусе. Во время рабочего состояния датчика все объекты, попадающие в его рабочую зону, становятся своеобразными рефлекторами. Как только световой луч отразившись от объекта попадает на приемник датчика, тот немедленно реагирует, меняя состояние выхода.4) фиксированное отражение от объекта -принцип действия датчика такой же как и у "отражение от объекта" но более чутко реагирующий на отклонение от настройки на объект. Например, возможно детектирование вздутой пробки на бутылке с кефиром, неполное наполнение вакуумной упаковки с продуктами и т.д. По своему назначению фотодатчики делятся на две основные группы: датчики общего применения и специальные датчики. К специальным, относятся типы датчиков, предназначенные для решения более узкого круга задач. К примеру, обнаружение цветной метки на объекте, обнаружение контрастной границы, наличие этикетки на прозрачной упаковке и т.д.Задача датчика обнаружить объект на расстоянии. Это расстояние варьируется в пределах 0,3мм-50м, в зависимости от выбранного типа датчика и метода обнаружения. Микроволновые датчики На смену кнопочно - релейным пультам приходят микропроцессорные автоматические системы управления технологическим процессом (АСУ ТП) высочайшей производительности и надежности, датчики оснащаются цифровыми интерфейсами связи, однако это не всегда приводит к повышению общей надежности системы и достоверности ее работы. Причина заключается в том, что сами принципы действия большинства известных типов датчиков накладывают жесткие ограничения на условия, в которых они могут использоваться. Например, для слежения за скоростью движения промышленных механизмов широко применяются бесконтактные (емкостные и индуктивные), а также тахогенераторные устройства контроля скорости (УКС). Тахогенераторные УКС имеют механическую связь с движущимся объектом, а зона чувствительности бесконтактных приборов не превышает нескольких сантиметров. Все это не только создает неудобства при монтаже датчиков, но и существенно затрудняет использование этих приборов в условиях пыли, которая налипает на рабочие поверхности, вызывая ложные срабатывания. Перечисленные типы датчиков не способны напрямую контролировать объект (например, ленту конвейера) - они настраиваются на движение роликов, крыльчаток, натяжных барабанов и т. д. Выходные сигналы некоторых приборов настолько слабы, что лежат ниже уровня промышленных помех от работы мощных электрических машин. Аналогичные трудности возникают при использовании традиционных сигнализаторов уровня - датчиков наличия сыпучего продукта. Такие устройства необходимы для своевременного отключения подачи сырья в производственные емкости. К ложным срабатываниям приводит не только налипание и пыль, но и прикосновение потока продукта при его поступлении в бункер. В неотапливаемых помещениях на работу датчиков влияет окружающая температура. Ложные срабатывания сигнализаторов вызывают частые остановки и запуски нагруженного технологического оборудования - основную причину его аварий, приводят к завалам, обрыву конвейеров, возникновению пожаро- и взрывоопасных ситуаций. Указанные проблемы несколько лет назад привели к разработке принципиально новых типов приборов - радиолокационных датчиков контроля скорости, датчиков движения и подпора, работа которых основана на взаимодействии контролируемого объекта с радиосигналом частотой около 10 10 Гц. Использование микроволновых методов контроля за состоянием технологического оборудования позволяет полностью избавиться от недостатков датчиков традиционных типов. Отличительными особенностями этих устройств являются: Отсутствие механического и электрического контакта с объектом (средой), расстояние от датчика до объекта может составлять несколько метров; Непосредственный контроль объекта (транспортерной ленты, цепи) а не их приводов, натяжных барабанов и т. д.; Малое энергопотребление; Нечувствительность к налипанию продукта за счет больших рабочих расстояний; Высокая помехоустойчивость и направленность действия; Разовая настройка на весь срок службы; Высокая надежность, безопасность, отсутствие ионизирующих излучений. Принцип действия датчика основан на изменении частоты радиосигнала, отраженного от движущегося объекта. Это явление ("эффект Допплера" ) широко используется в радиолокационных системах для дистанционного измерения скорости. Движущийся объект вызывает появление электрического сигнала на выходе микроволнового приемо-передающего модуля. Так как уровень сигнала зависит от свойств отражающего объекта, датчики движения могут использоваться для того, чтобы сигнализировать об обрыве цепи (ленты), наличии на конвейерной ленте каких-либо предметов или материалов. Лента имеет гладкую поверхность и низкий коэффициент отражения. Когда мимо датчика, установленного над рабочей веткой транспортера, начинает двигаться продукт, увеличивая коэффициент отражения, прибор сигнализирует о движении, то есть, фактически о том, что лента не пуста. По длительности выходного импульса можно на значительном расстоянии судить о размере перемещаемых предметов, производить селекцию и т.д. При необходимости заполнить какую-либо емкость (от бункера до шахты) можно точно определить момент окончания засыпки - опущенный на определенную глубину датчик будет показывать движение наполнителя до тех пор, пока не будет засыпан. Конкретные примеры использования микроволновых датчиков движения в различных отраслях промышленности определяются ее спецификой, но в целом они способны решать самые разнообразные задачи безаварийной эксплуатации оборудования и повысить информативность автоматизированных систем управления. Список использованных источников 1) Е.М. Гордин, Ю.Ш. Митник, В.А. Тарлинский Основы автоматики и вычислительной техники Москва «Машиностроение», 1978 2) Густав Олссон, Джангуидо Пиани Цифровые системы автоматизации и управления СПб.: Невский Диалект, 2001 3) В.В.Сазонов Методические указания к выполнению лабораторной работы «Исследование реостатного датчика линейных перемещений» 4) Чугайнов Н.Г. Реферат «Температурные датчик», Красноярск 20035) Федосов А. В. Реферат «Датчики скорости» - Москва 2003 6) Д. Н. Шестаков, генеральный директор ООО "ПромРадар" Микроволновые датчики промышленного применения 7) Журнал «Современная электроника» 6, 2006 8) Каталог предприятия «Сенсор» 9) Компоненты OMRON / Фотоэлектрические датчики Автор статьи : Сергей Никулин, преподаватель УО "Гомельский государственный политехнический колледж " .Индуктивный датчик приближения. Внешний вид В промышленной электронике индуктивные, и другие датчики применяются очень широко. Статья будет обзорной (если хотите, научно-популярной). Приведены реальные инструкции к датчикам и ссылки на примеры. Виды датчиковИтак, что вообще такое датчик. Датчик – это устройство, которое выдаёт определённый сигнал при наступлении какого-либо определённого события. Иначе говоря, датчик при определённом условии активируется, и на его выходе появляется аналоговый (пропорциональный входному воздействию) или дискретный (бинарный, цифровой, т.е. два возможных уровня) сигнал.
Датчиков бывает великое множество. Перечислю лишь те разновидности датчиков, с которыми приходится сталкиваться электрику и электронщику. Индуктивные. Активируется наличием металла в зоне срабатывания. Другие названия – датчик приближения, датчик положения, индукционный, датчик присутствия, индуктивный выключатель, бесконтактный датчик или выключатель. Смысл один, и не надо путать. По-английски пишут “proximity sensor”. Фактически это – датчик металла. Оптические. Другие названия – фотодатчик, фотоэлектрический датчик, оптический выключатель. Такие применяются и в быту, называются “датчик освещённости” Емкостные. Срабатывает на наличие практически любого предмета или вещества в поле активности. Давления . Давления воздуха или масла нет – сигнал на контроллер или рвёт . Это если дискретный. Может быть датчик с токовым выходом, ток которого пропорционален абсолютному давлению либо дифференциальному. Концевые выключатели (электрический датчик). Это обычный пассивный выключатель, который срабатывает, когда на него наезжает или давит объект.
Пока хватит, перейдём к теме статьи. Индуктивный датчик является дискретным. Сигнал на его выходе появляется, когда в заданной зоне присутствует металл. В основе работы датчика приближения лежит генератор с катушкой индуктивности. Отсюда и название. Когда в электромагнитном поле катушки появляется металл, это поле резко меняется, что влияет на работу схемы.
Поле индукционного датчика. Металлическая пластина меняет резонансную частоту колебательного контура
Схема индуктивного npn датчика. Приведена функциональная схема, на которой: генератор с колебательным контуром, пороговое устройство (компаратор), выходной транзистор NPN, защитные стабилитрон и диоды Большинство картинок в статье – не мои, в конце можно будет скачать источники. Применение индуктивного датчикаИндуктивные датчики приближения применяются широко в промышленной автоматике, чтобы определить положение той или иной части механизма. Сигнал с выхода датчика может поступать на вход контроллера, преобразователя частоты, реле, пускателя, и так далее. Единственное условие – соответствие по току и напряжению.
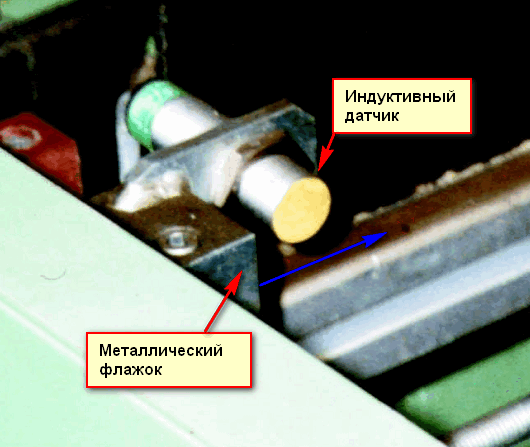
Работа индуктивного датчика. Флажок движется вправо, и когда достигает зоны чувствительности датчика, датчик срабатывает. Кстати, производители датчиков предупреждают, что не рекомендуется подключать непосредственно на выход датчика лампочку накаливания. О причинах я уже писал – . Характеристики индуктивных датчиковЧем отличаются датчики.
Конструкция, вид корпусаТут два основных варианта – цилиндрический и прямоугольный . Другие корпуса применяются крайне редко. Материал корпуса – металл (различные сплавы) или пластик. Диаметр цилиндрического датчикаОсновные размеры – 12 и 18 мм . Другие диаметры (4, 8, 22, 30 мм) применяются редко.
Расстояние переключения (рабочий зазор)Это то расстояние до металлической пластины, на котором гарантируется надёжное срабатывание датчика. Для миниатюрных датчиков это расстояние – от 0 до 2 мм, для датчиков диаметром 12 и 18 мм – до 4 и 8 мм, для крупногабаритных датчиков – до 20…30 мм. Количество проводов для подключенияПодбираемся к схемотехнике. 2-проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки.
2-проводный датчик. Схема включения Нагрузку можно подключать в любой провод, для постоянного напряжения важно соблюдать полярность. Для датчиков, рассчитанных на работу с переменным напряжением – не играет роли ни подключение нагрузки, ни полярность. Можно вообще не думать, как их подключать. Главное – обеспечить ток. 3-проводные. Наиболее распространены. Есть два провода для питания, и один – для нагрузки. Подробнее расскажу отдельно. 4- и 5-проводные. Такое возможно, если используется два выхода на нагрузку (например, PNP и NPN (транзисторные), или переключающие (реле). Пятый провод – выбор режима работы или состояния выхода. Виды выходов датчиков по полярностиУ всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента: Релейный. Тут всё понятно. Реле коммутирует необходимое напряжение либо один из проводов питания. При этом обеспечивается полная гальваническая развязка от схемы питания датчика, что является основным достоинством такой схемы. То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением. Используется в основном в крупногабаритных датчиках. Транзисторный PNP. Это – PNP датчик. На выходе – транзистор PNP, то есть коммутируется “плюсовой” провод. К “минусу” нагрузка подключена постоянно. Транзисторный NPN. На выходе – транзистор NPN, то есть коммутируется “минусовой”, или нулевой провод. К “плюсу” нагрузка подключена постоянно. Можно чётко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод и коммутируется. Другой провод подключен к нагрузке постоянно. Ниже будут даны схемы включения датчиков , на которых будет хорошо видно эти отличия. Виды датчиков по состоянию выхода (НЗ и НО)Какой бы ни был датчик, один из основных его параметров – электрическое состояние выхода в тот момент, когда датчик не активирован (на него не производится какое-либо воздействие). Выход в этот момент может быть включен (на нагрузку подается питание) либо выключен. Соответственно, говорят – нормально закрытый (нормально замкнутый, НЗ) контакт либо нормально открытый (НО) контакт. В иностранной аппаратуре, соответственно – NС и NО. То есть, главное, что надо знать про транзисторные выходы датчиков – то, что их может быть 4 разновидности, в зависимости от полярности выходного транзистора и от исходного состояния выхода:
Положительная и отрицательная логика работыЭто понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле). ОТРИЦАТЕЛЬНАЯ или ПОЛОЖИТЕЛЬНАЯ логика относится к уровню напряжения, который активизирует вход. ОТРИЦАТЕЛЬНАЯ логика: вход контроллера активизируется (логическая “1”) при подключении к ЗЕМЛЕ. Клемму S/S контроллера (общий провод для дискретных входов) при этом необходимо соединить с +24 В=. Отрицательная логика используется для датчиков типа NPN. ПОЛОЖИТЕЛЬНАЯ логика: вход активизируется при подключении к +24 В=. Клемму контроллера S/S необходимо соединить с ЗЕМЛЕЙ. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего. Существуют варианты различных устройств и подключения к ним датчиков, спрашивайте в комментариях, вместе подумаем. Продолжение статьи – . Во второй части даны реальные схемы и рассмотрено практическое применение различных типов датчиков с транзисторным выходом. Важнейшим и наиболее широко используемым техническим средством автоматизации являются датчики. Датчиком называется первичный преобразователь контролируемой или регулируемой величины в выходной сигнал, удобный для дистанционной передачи и дальнейшего использования. В состав датчика входят воспринимающий (чувствительный) орган и один или несколько промежуточных преобразователей. Довольно часто датчик состоит только из одного воспринимающего органа (например: термопара, термометр сопротивления и т.д.) . Датчик характеризуется входными и выходными величинами. Изменение выходной величины в зависимости от изменения входной величины называется чувствительностью датчика ; Изменение выходного сигнала, возникающего в результате изменения внутренних свойств датчика или изменения внешних условий его работы - изменения температуры среды, колебания напряжения и т.д. называются погрешностью датчика ; Отставание изменений выходной величины от изменений входной величины называется инерционностью датчика . Все эти показатели датчиков необходимо учитывать при выборе датчиков для автоматизации конкретной машины или технологического процесса. Датчики предназначенные для измерения физических (не электрических входных величин уровня влажности, плотности, температуры и др.) преобразуют их в электрические выходные величины, передаваемые на расстоянии для воздействия на исполнительный механизм. Датчики подразделяются: - по назначению - измерение перемещения усилий, температуры, влажности, скорости - по принципу действия - электротехнические, механические, тепловые, оптические, и - по способу преобразования - неэлектрической величины в электрическую - индуктивные, термоэлектрические, фотоэлектрические, радиоактивные, активного сопротивления (потенциометрические, тензометрические, и т.д.). Датчики бывают: - контактные (непосредственно соприкасаются); - бесконтактные (не соприкасаются: фотоэлектрические, ультразвуковые, радиоактивные, оптические и т.д.). ПЕРЕЧЕНЬ используемых в строительном производстве для автоматизации строительных машин и технологических процессов, технических средств автоматизации и автоматизированных систем управления. 1. Для контроля и информации: 1.1 качество уплотняемого грунта (плотность); 1.2 подсчёт выполняемого объема работ (пройденных км, поданной воды и т.д.); 1.3 скорость движения машины; 1.4 наличие жидкости в ёмкости и её количество; 1.5 количество сыпучих материалов, находящихся в ёмкости (цемент, песок, щебень 2. Для регулирования: 2.1 поддержание заданной температуры при прогреве бетона; 2.2 термостат охлаждающей жидкости двигателя внутреннего сгорания; 2.3 давление жидкости в ёмкости (системе); 2.4 давление газов (воздуха) в системе (ёмкости); 2.5 грузоподъёмность грузоподъёмных и других машин; 2.6 высота подъёма рабочего органа машины (стрелы крана, рабочей площадки, подъёмников и лифтов, загрузочного скипа, ковша и т.д.); 2.7 высота подъёма груза грузоподъёмной машины; 2.8 поворот стрелы грузоподъёмного крана; 2.9 ограничение движения машины по путям (башенный или мостовой кран, тележки 2.10 ограничение приближения к проводам, находящихся под напряжением (стрела и трос грузоподъёмного крана); 2.11 поддержание заданного уровня и уклона дна котлована и траншеи при работе экскаватора; 2.12 защита от короткого замыкания; 2.13 защита от повышения (понижения) напряжения; 2.14 отключение всех двигателей и закрепление захватами за рельсы башенного крана в зависимости от скорости ветра. 3. Для локальной автоматизации системы управления: 3.1 режим работы двигателя в зависимости от нагрузки на рабочий орган (бульдозер - заглубление отвала, скрепер и грейдер - заглубление ножа, экскаватор - заглубление ковша); 3.2 задание доз компонентов бетонной смеси в соответствии с рецептурой; 3.3 дозирование составляющих материалов для приготовления бетонной смеси; 3.4 определение продолжительности и выдерживание этой подолжительности при приготовлении бетонной смеси. 4. Для автоматизации системы управления: 4.1 автоматизированная система управления работой бетоносмесительной установки; 4.2 автоматизированная система управления бульдозером - комплект “АКА-Дормаш”, “Комбиплан-10 ЛП”, при выполнении работ по заданным отметкам, уклону и направлению; 4.3 автоматизированная система управления автогрейдером - “Профиль-20”, ”Профиль-30” при профилировании дорог и планировка территории; 4.4 автоматизированная система управления скрепером - “Копир-Стабиплан-10” при разработке грунта или вертикальной планировке под заданную отметку (высотное положение ковша, перемещение задней стенки ковша, заглубление (подъём) ножа ковша и регулирование двигателя тягача и его направление; 4.5 автоматизированная система управления многоковшовым экскаватором при разработке траншей по заданному направлению, глубине копания, заданному уклону дна траншеи и регулирования работы двигателя. Для наглядного изображения автоматизированной (автоматической) системы используются графические изображения: Структурная схема, которая отражает улучшенную структуру системы и взаимосвязи между пунктами контроля и управления объектами; Функциональная схема, чертёж на котором схематически условными обозначениями изображены технологическое оборудование, коммуникации, органы управления и средства автоматизации (приборы, регуляторы, датчики) указанием связей между технологическим оборудованием и элементами автоматики. На схеме указаны параметры которые подлежат контролю и регулированию; А также принципиальные, монтажные и другие схемы. Типы датчиков и их названия определяются использованием в них различных ультразвуковых преобразователей и способов сканирования. В за-висимости от вида преобразователей можно выделить: ● секторные механические датчики (sector mechanical probe) - с одно-элементными или многоэлементными кольцевыми решетками; ● линейные датчики с многоэлементными линейными решетками ; ● конвексные и микроконвексные датчики (convex или microconvex probe) - с конвексными и микроконвексными решетками соответственно; ● фазированные секторные датчики (phased array probe) - с многоэле-ментными линейными решетками; ● датчики с двухмерной решетко й, линейные, конвексные и секторные. Здесь мы назвали основные типы датчиков, не оговаривая их медицинское назначение, рабочую частоту и конструктивные особенности. В секторных механических датчиках (рис.2.11 а, 2.11 б) рабочая поверхность (защитный колпачок) закрывает объем, в котором находится перемещающийся по углу одноэлементный или кольцевой УЗ - преобразователь. Объем под колпачком заполнен акустически прозрачной жидкостью для уменьшения потерь при прохождении УЗ - сигналов. Основной характеристикой секторных механических датчиков помимо рабочей частоты является угловой размер сектора сканирования, который указывается в маркировке датчика (иногда дополнительно дается длина соответствующей дуги Н рабочей поверхности). Пример маркировки: 3,5 МГц/90°. В линейных, конвексных, микроконвексных и фазированных (секторных) датчиках электронного сканирования рабочая поверхность совпадает с излучающей поверхностью преобразователя, которая называется апертурой , и равна ей по размерам. Характерные размеры апертур используются в маркировке датчиков и помогают определиться при выборе датчика. В линейных датчиках характерно является длина апертуры L (рис.2.11 в), так как именно она определяет ширину прямоугольной зоны обзора. Пример маркировки линейного датчика 7,5 МГц/42 мм. Следует иметь в виду, что ширина зоны обзора в линейном датчике всегда меньше на 20-40% длины апертуры. Таким образом, если указан размер апертуры 42 мм, ширина зоны обзора - не более 34 мм. В конвексных датчиках зона обзора определяется двумя характерные размерами - длиной дуги Н (иногда её хорды), соответствующей выпуклой рабочей части, и угловым размером сектора сканирования α в градусе рис.2.11 г. Пример маркировки конвексного датчика: 3,5 МГц/60°/60 мм. Реже для маркировки используете радиус R кривизны рабочей поверхности, например: 3,5 МГц/60R (радиус - 60 мм). Рис. 2.11. Основные типы датчиков для наружного обследования: а, б- секторные механические (а – кардиологический, б – с водной насадкой); в – линейный электронный; г – конвексный; д – микроконвексный; е – фазированный секторный В микроконвексных датчиках характерным является R - радиус кривизны рабочей поверхности (апертуры), иногда дополнительно дается угол дуги α, определяющий угловой размер сектора обзора (рис. 2.11,д). Пример маркировки: 3,5 МГц/20R (радиус - 20 мм). Для фазированного секторного датчика дается угловой размер сектора электронного сканирования в градусах. Пример маркировки: 3,5 МГц/90° . Изображенные на рис. 2.11 датчики используются для наружного обследования. Помимо них существует большое количество внутриполостных и узкоспециализированных датчиков. Целесообразно ввести классификацию датчиков по областям медицинского применения. 1. Универсальные датчики для наружного обследования (abdominal probe). Универсальные датчики применяются для обследования абдоминальной области и органов малого таза у взрослых и детей. 2. Датчики для поверхностно расположенных органов (small parts probe). Применяются для исследования неглубоко расположенных малых органов и структур (например, щитовидной железы, периферических сосудов, суставов) 3. Кардиологические датчики (cardiac probe). Для исследования сердца используются датчики секторного типа, что связано с особенностью наблюдения через межреберную щель. Применяются датчики механического сканирования (одноэлементные или с кольцевой решеткой) и фазированные электронные. 4. Датчики для педиатрии (podiatric probes). Для педиатрии используются те же датчики, что и для взрослых, но только с большей частотой (5 или 7,5 МГц), что позволяет получить более высокое качество изображения. Это возможно благодаря малым размерам пациентов. 5. Внутриполостные датчики (intracavitary probes). Существует большое разнообразие внутриполостных датчиков, которые отличаются между собой по областям медицинского применения. ● Трансвагинальные (интравагинальные) датчики (transvaginal or edovaginal probe). ● Трансректальные датчики (transrectal or endorectal probe). ● Интраоперационные датчики (intraoperative probe). ● Трансуретральные датчики (transurethral probes). ● Чреспищеводные датчики (transesophageal probes). ● Внутрисосудистые датчики (intravascular probes). 6. Биопсийные или пункционные датчики (biopsy or puncture probes). Используются для точного наведения биопсийных или пункционных игл. С этой целью специально сконструированы датчики, в которых игла может проходить через отверстие (или щель) в рабочей поверхности (апертуре). 7. Узкоспециализированные датчики . Большинство датчиков, о которых говорилось выше, имеют достаточно широкий спектр применения. В то же время можно выделить группу датчиков узкого применения, и о них следует сказать особо. ● Офтальмологические датчики (ophtatmology probes). ● Датчики для транскраниальных исследований (transcranial probes). ● Датчики для диагностики синуситов, фронтитов и гайморитов. ● Датчики для ветеринарии (veterinary probes). 8. Широкополосные и многочастотные датчики . В современных сложных приборах все большее применение находят широкополосные датчики. Эти датчики конструктивно оформлены аналогично обычным датчикам, рассмотренным выше и отличаются от них тем, что используют широкополосный УЗ -преобразователь, т.е. датчик с широкой полосой рабочих частот. 9. Доплеровские датчики . Датчики применяются только для получения информации о скорости или спектре скоростей кровотока в сосудах. Об этих датчиках рассказывается в разделах, посвященных доплеровским УЗ -приборам. 10. Датчики для получения трехмерных изображений . Специальные датчики для получения 3D (трехмерных) изображений используются редко. Чаще применяются обычные датчики двухмерного изображения вместе со специальными приспособлениями, обеспечивающими сканирование по третьей координате. Качество получаемой информации зависит от технического уровня прибора – чем сложнее и совершеннее прибор, тем выше качество диагностической информации. Как правило, по техническому уровню приборы делятся на четыре группы: простые приборы; приборы среднего класса; приборы повышенного класса; приборы высокого класса (иногда называемого high-end). Среди изготовителей и пользователей ультразвуковой диагностической техники отсутствуют согласованные критерии оценки класса приборов, так как имеется очень большое количество характеристик и параметров, по которым можно сравнивать приборы между собой. Тем не менее, можно оценить уровень сложности аппаратуры, от которой в значительной мере зависит качество получаемой информации. Одним из основных технических параметров, определяющих уровень сложности ультразвукового сканера, является максимальное число приемных и передающих каналов в электронном блоке прибора, так как чем больше число каналов, тем лучше чувствительность и разрешающая способность - основные характеристики качества ультразвукового изображения. В простых (как правило, переносных) ультразвуковых сканерах число каналов передачи-приема не более 16, в приборах среднего и повышенного класса 32, 48 и 64. В приборах высокого класса число каналов может, быть более 64, например 128, 256, 512 и даже более. Как правило, ультразвуковые сканеры высокого и повышенного класса являются приборами с цветовым допплеровским картированием. Приборы высокого класса обычно используют в максимальной мере современные возможности цифровой обработки сигналов, начиная практически с выхода датчиков. По этой причине такие приборы называют цифровыми системами или платформами (digital system). Контрольные вопросы 1. Что такое акустическое сопротивление и его влияние на отражение ультразвука? 2. Как зависит затухание ультразвука в биологических тканях от частоты? 3. Как изменяется спектр импульсного УЗ – сигнала от глубины? 4. Какие режимы работы предусмотрены в УЗ – сканерах? 5. В чем заключается режим работы В ? 6. В чем заключается режим работы А ? 7. В чем заключается режим работы М ? 8. В чем заключается режим работы Д ? 9.Объясните работу УЗ – преобразователя. 10. Какие конфигурации пьезоэлементов встречаются в различных типов датчиков? 11. Какие типы датчиков существуют в УЗ – сканерах? В системах автоматики датчик предназначен для преобразования контролируемой или регулируемой величины (параметра регулируемого объекта) в выходной сигнал, более удобный для дальнейшего движения информации. Поэтому датчик нередко называют преобразователем, хотя этот термин является слишком общим, так как любой элемент автоматики и телемеханики, имея вход и выход, является в той или иной мере преобразователем. В простейшем случае датчик осуществляет только одно преобразование Y=f(X), как, например, силы в перемещении (в пружине), или температуры в электродвижущую силу (в термоэлементе) и т.п. Такой вид датчиков называют датчики с непосредственным преобразованием. Однако в ряде случаев не удается непосредственно оказать воздействие входной величины Х на необходимую входную величину U (если такая связь неудобна или она не дает желаемых качеств). В этом случае осуществляют последовательные преобразования: входной величиной Х воздействуют на промежуточную Z, а величиной Z - на необходимую величину Y: Z=f1(Х); Y=f2(Z) В результате получается функция, связывающая Х с Y: Y=f2=F(Х). Число таких последовательных преобразований может быть и больше двух, и в общем случае функциональная связь Y с Х может проходить через ряд промежуточных величин: Y=fn{...}=F(Х). Датчики, имеющие такие зависимости, называются датчиками с последовательным преобразованием. Все остальные части называются промежуточными органами . В датчике с двумя преобразованиями промежуточные органы отсутствуют, в нем имеются только воспринимающий и исполнительный органы. Нередко один и тот же конструктивный элемент выполняет функции нескольких органов. Например, упругая мембрана выполняет функцию воспринимающего органа (преобразование давления в силу) и функцию исполнительного органа (преобразование силы в перемещение). Классификация датчиков. Исключительное многообразие датчиков, применяемое в современной автоматике, вызывает необходимость их классификации. В настоящее время известны следующие типы датчиков, которые наиболее целесообразно классифицировать по входной величине, практически соответствующей принципу действия:
Здесь рассматриваются наиболее распространенные датчики, у которых хотя бы одна из величин (входная или выходная) – электрическая. Датчики различают также по диапазону изменения входного сигнала. Например, одни электрические датчики температуры предназначены для измерения температуры от 0 до 100°С, а другие – от 0 до 1600°С. Очень важно, чтобы диапазон изменения выходного сигнала был при этом одинаков (унифицирован) для разных приборов. Унификация выходных сигналов датчиков позволяет использовать общие усилительные и исполнительные элементы для самых разных систем автоматики. Электрические датчики относятся к наиболее важным элементам систем автоматики. С помощью датчиков контролируемая или регулируемая величина преобразуется в сигнал, в зависимости от изменения которого и протекает весь процесс регулирования. Наибольшее распространение в автоматике получили датчики с электрическим выходным сигналом. Объясняется это, прежде всего удобством передачи электрического сигнала на расстояние, его обработки и возможностью преобразования электрической энергии в механическую работу. Кроме электрических распространение получили механические, гидравлические и пневматические датчики. Электрические датчики в зависимости от принципа производимого ими преобразования делятся на два типа – модуляторы и генераторы. У модуляторов (параметрических датчиков) энергия входа воздействует на вспомогательную электрическую цепь, изменяя ее параметры и модулируя значение и характер тока или напряжения от постороннего источника энергии. Благодаря этому одновременно усиливается сигнал, поступивший на вход датчика. Наличие постороннего источника энергии является обязательным условием работы датчиков – модуляторов. Рис. 1. Функциональные блоки датчика – модулятора (а) и датчика – генератора (б). Модуляция осуществляется с помощью изменения одного из трех параметров – омического сопротивления, индуктивности, емкости. В соответствии с этим различают группы омических, индуктивных и емкостных датчиков. Каждая из этих групп может делиться на подгруппы. Так, наиболее обширная группа омических датчиков может быть разделена на подгруппы: тензорезисторы, потенциометры, терморезисторы, фоторезисторы. Ко второй подгруппе относятся варианты индуктивных датчиков, магнитоупругие и трансформаторные. Третья подгруппа объединяет различного типа емкостные датчики. Второй тип – датчики-генераторы являются просто преобразователями. Они основаны на возникновении электродвижущей силы под влиянием различных процессов, связанных с контролируемой величиной. Возникновение такой электродвижущей силы может происходить, например, вследствие электромагнитной индукции, термоэлектричества, пьезоэлектричества, фотоэлектричества и других явлений, вызывающих разделение электрических зарядов. Соответственно этим явлениям генераторные датчики подразделяются на индукционные, термоэлектрические, пьезоэлектрические и фотоэлектрические. Возможны еще группы электротехнических, электростатических датчиков, датчиков Холла и др. Потенциометрические и тензометрические датчики. Потенциометрические датчики применяются для преобразования угловых или линейных Перемещений в электрический сигнал. Потенциометрический датчик представляет собой переменный резистор, который может включаться по схеме реостата или по схеме потенциометра (делителя напряжения). Конструктивно потенциометрический датчик представляет собой электромеханическое устройство (рис. 2-1), состоящее из каркаса 1 с намотанным на него тонким проводом (обмотка) из сплавов с высоким удельным сопротивлением, скользящего контакта - щетки 2 и токопровода 3, выполненного в виде или скользящего контакта, или спиральной пружинки. Каркас с намотанным проводом закрепляется неподвижно, а щетка соединяется механически с подвижной частью ОУ, перемещение которой нужно преобразовать в электрический сигнал. При перемещении щетки изменяется активное сопротивление Rх участка провода между щеткой и одним из выводов обмотки датчика. В зависимости от схемы включения датчика перемещение может быть преобразовано в изменение активного сопротивления или тока (при последовательной схеме включения) или в изменение напряжения (при Включении по схеме делителя напряжения). На точность преобразования при последовательном включении значительное влияние оказывает изменение сопротивления соединительных проводов, переходного сопротивления между щеткой и обмоткой датчика. В устройствах автоматики чаще применяется включение потенциометрических датчиков по схеме делителя напряжения. При одностороннем перемещении подвижной части ОУ применяют однотактную схему включения, дающую нереверсивную статическую характеристику. При двустороннем перемещении применяют двухтактную схему включения, дающую реверсивную характеристику (рис. 2-2). В зависимости от конструкции и функционального закона, связывающего выходной сигнал датчика с перемещением щетки, различают потенциометрические датчики нескольких типов.  Линейные потенциометрические датчики. Они имеют одинаковое сечение каркаса по всей длине. Диаметр провода и шаг намотки у них постоянны. В режиме холостого хода (при нагрузке Rn→∞ и I→0) выходное напряжение линейного потенциометрического датчика Uвых пропорционально перемещению щётки х: Uвых = (U0/L)х, где U0 - напряжение питания датчика; l-длина намотки. Напряжение питания датчика U0 и длина намотки L являются постоянными величинами, поэтому в окончательном виде: Uвых = kx, где k=U0/L- коэффициент передачи.  Функциональные потенциометрические датчики. Они имеют функциональную нелинейную зависимость между перемещением щетки и выходным напряжением: Uвых= f(х). Часто применяются функциональные потенциометры, имеющие тригонометрическую, степенную или логарифмическую характеристику. Применяют функциональные потенциометры в аналоговых автоматических вычислительных устройствах, в поплавковых измерителях уровня жидкости для баков сложной геометрической формы и т. д. Получить требующуюся функциональную зависимость у потенциометрических датчиков можно различными методами: изменением высоты каркаса потенциометра (плавно или ступенчато), шунтированием участков обмотки потенциометра резисторами. Многооборотные потенциометрические датчики. Они являются конструктивной разновидностью линейных потенциометрических датчиков с угловым перемещением щетки. У многооборотных датчиков щетка должна повернуться на угол 360° несколько раз, чтобы переместиться на всю длину намотки L. Достоинствами многооборотных датчиков являются высокая точность, малый порог чувствительности, небольшие габариты, недостатками - относительно большой момент трения, сложность конструкции, наличие нескольких скользящих контактов и трудность использования в быстродействующих системах. Металлопленочные потенциометрические датчики. Это новая перспективная конструкция потенциометрических датчиков. Каркас у них представляет собой стеклянную или керамическую пластину, на которую наносится тонкий слой (несколько микрометров) металла с высоким удельным сопротивлением. Съем сигнала у металлопленочных потенциометрических датчиков осуществляется металлокерамическими щетками. Изменение ширины металлической пленки или ее толщины позволяет получить линейную или нелинейную характеристику потенциометрического датчика, не изменяя его конструкции. Используя обработку электронным или лазерным лучом, можно осуществлять автоматическую подгонку сопротивления датчика и его характеристики к заданным значениям. Габариты металлопленочных потенциометрических датчиков существенно меньше, чем проволочных, а порог чувствительности практически равен нулю ввиду отсутствия витков обмотки. Оценивая потенциометрические датчики, следует отметить наличие у них как существенных достоинств, так и крупных недостатков. Их достоинствами являются: простота конструкции; высокий уровень выходного сигнала (напряжение - до нескольких десятков вольт, ток - до нескольких десятков миллиампер); возможность работы как на постоянном, так и на переменном токе. Их недостатка ми являются: недостаточно высокая надежность и ограниченная долговечность из-за наличия скользящего контакта н истирания обмотки; влияние на характеристику сопротивления нагрузки; потери энергии за счет рассеяния мощности активным сопротивлением обмотки; сравнительно большой момент, необходимый для вращения подвижной части датчика со щеткой. |



| Читайте: |
|---|
Популярное:

Новое
- Тест особенности взаимодействия природы и человека
- Борьба с неблагоприятными условиями внешней среды (приспособление)
- Белки как форма существования жизни Клиническое значение ферментов
- 2 Фотосинтез, необходимые для него условия
- Биология в лицее Чем личинка рыбы отличается от малька
- Определение биологии как науки
- Бланки форм документов по учету основных средств
- Банковская карточка с образцами подписей и оттиска печати
- Как сделать домашние чипсы
- Китайская лапша с курицей и овощами рецепт Китайская лапша приготовить с курицей ресторан рецепты




